对于许多机器人项目来说,大多数型号的Raspberry Pi都被压倒了,但 Raspberry Pi Pico 微控制器和随附的 RP2040 芯片似乎确实符合要求。今天证明这个案例的是Chris Parrott,他开发了自己的 Raspberry Pi RP2040 机器人 PCB。
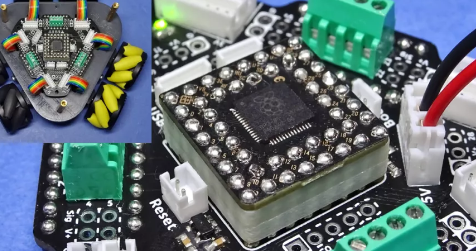
这个手掌大小的机器人项目被称为 Hex Mecanum。它采用六面设计,轮子安装在三个侧面。Parrott 本周在 Tweet 中透露了 HexDriver 板样品的图片,稍后再次将组件焊接到位。Parrott 的机器人是一个个人项目,但在 Pimoroni 的日常工作中,他们可以使用所有最新产品,我们可以看到该机器人由 PGA2040 提供动力,PGA2040将 RP2040 拆分为比 Raspberry Pi Pico 更小的封装,同时提供所有 GPIO 引脚。
从我们所见,一些最好的 Raspberry Pi 项目使用定制的 PCB。这个额外的步骤需要时间,正如 Parrott 所指出的,他在这个电路板设计上工作了几个月,但最终的结果通常值得付出额外的努力——即使只是为了体验。
开发您自己的载板的另一个好处是在形状和功能方面发挥创意。Parrott 通过安装六个麦克纳姆轮来利用六角形空间,由 N20 50:1 减速电机提供动力,带有用于精确控制电机速度的编码器。所有电机均通过 DRV8833 电机控制器进行控制。我们请 Parrott 详细说明机器人的功能。“该板本身可以驱动 6 个带编码器的直流电机,或 3 个步进电机,或 12 个伺服电机,并支持 7 个 I2C 传感器(用于飞行时间、IMU 等)”
如果您想仔细查看这个由 RP2040 驱动的机器人,请通过Twitter访问原始线程,并确保关注Chris Parrott以获取更新。
免责声明:本文由用户上传,如有侵权请联系删除!